Actuation Design of Tendon-Driven Arms
Published on IEEE Transactions on Mechatronics
Robotic manipulators for aerospace missions must stay lightweight while remaining dependable in remote and hazardous environments. To meet these constraints, we introduce Time-Division Multiplexing Actuation (TDMA), a practical actuation strategy for tendon-driven robots that reduces the number of actuators without sacrificing torque output or fault tolerance.
Introduction Video
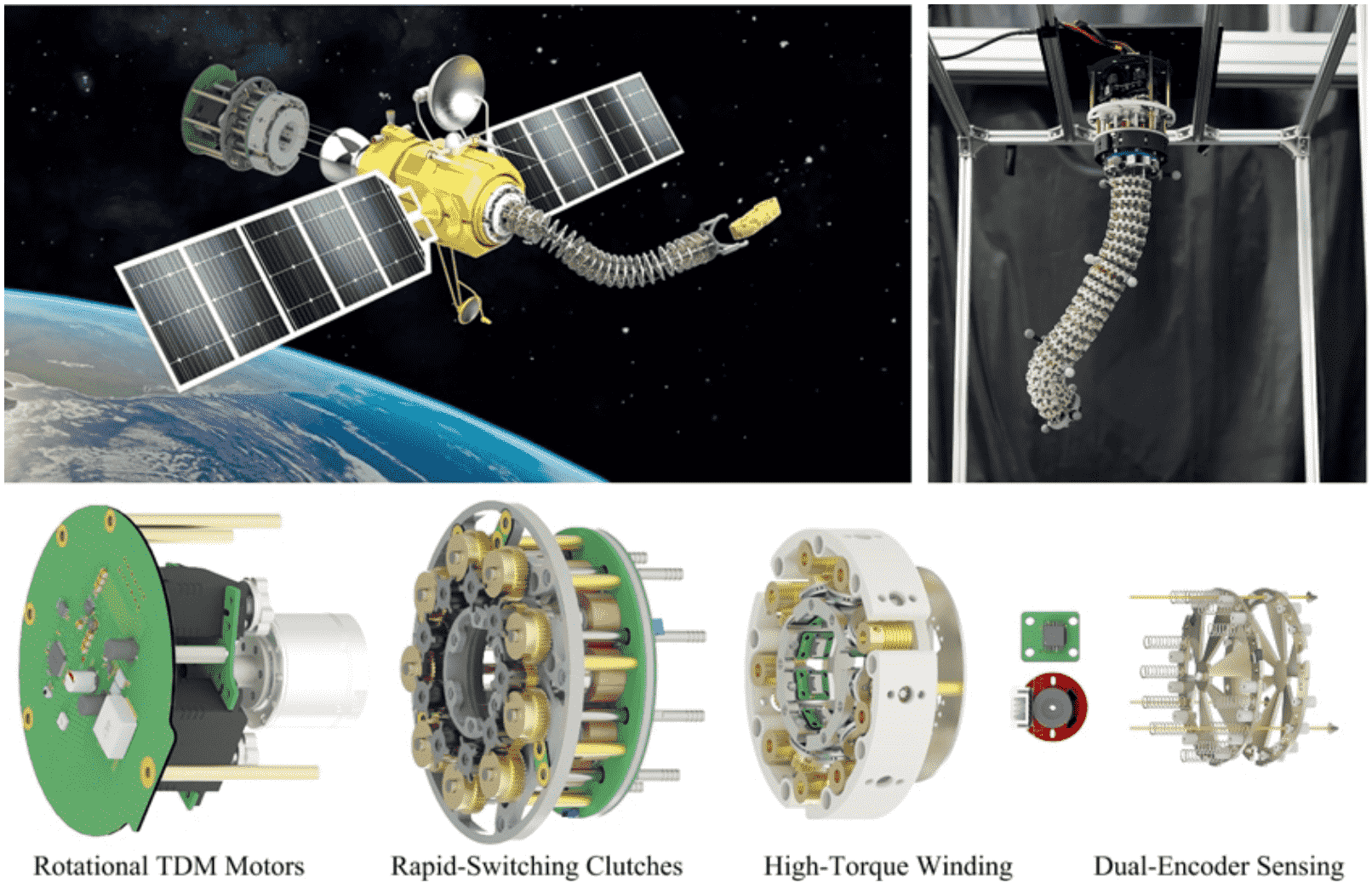
TDMA is built around a vertically stacked rotational selection mechanism that combines self-rotating TDM motors for fast reconfiguration, electromagnetic clutches for sub-0.1 second engagement, a worm gear reducer for high load capacity and self-locking, and a dual-encoder design for accurate long-term positioning. Using this hardware, the MuxArm platform achieves a self-weight of 2.17 kg, supports a 10 kg actuator driving capacity, and maintains end-effector accuracy up to 1% of its length even under partial servo failure. We also develop an actuation-space trajectory planning method that enables fault-tolerant control and reduces tendon load by up to 50% compared with conventional approaches.